Radiale und zeitliche metrische Komponenten für die innere und äußere Schwarzschildlösung; ist der umfanggetreue Radius der Masse:
Auf die Fläche als Kurvenlänge projizierte physikalische Radialdistanz :
Zeitdilatation (Eigenzeit des lokalen Schalenbeobachters durch Koordinatenzeit des feldfreien Buchhalters):
Plot A1: Isometrische Einbettung der Radialdistanz; die blaue Kurvenlänge im 1D Plot () stellt den tatsächlichen radialen Abstand im Verhältnis zum auf der -Achse dargestellten Umfangradius dar. Die -Achse ist eine räumliche Hilfsdimension.
Plot A2: Die rote Funktion () zeigt die Zeitdilation eines lokalen Schalenbeobachters; im inneren des schwarzen Lochs läuft die Eigenzeit eines stationären Schalenbeobachters relativ zur Koordinatenzeit des externen Koordinatenbuchalters wieder rückwärts - was ein mathematisches Artefakt ist, da es innerhalb des Horizonts keine stationären Beobachter mehr gibt, und es außerdem bereits eine unendliche Koordinatenzeit (wenn auch endliche Eigenzeit) dauert damit die Masse kleiner als ihr Ereignishorizont werden kann.
Plot A; Animationsparameter: Massenausdehnung :
Standbild A-Ⅰ: Ausdehnung der Masse bis zum zehnfachen Schwarzschildradius:
Standbild A-Ⅱ: Ausdehnung der Masse bis zum dreifachen Schwarzschildradius:
Standbild A-Ⅲ: Ausdehnung der Masse bis zur Photonensphäre bei :
Standbild A-Ⅳ: ; ab dieser Ausdehnung ist der Gravitationskollaps unvermeidlich, unendliche Zeitdilatation im Zentrum:
Standbild A-Ⅴ: ; der umfanggetreue Koordinatenradius entspricht dem metrischen Radius , unendliche ZD am Horizont:
Plot B zeigt das Paraboloid aus der umfanggetreuen 2D () Vogelperspektive; alle Schalen haben einen physikalischen Abstand von Animationsparameter: Massenausdehnung :
Standbild B-Ⅰ: euklidscher Raum, keine Masse:
Standbild B-Ⅱ: Ausdehnung bis :
Standbild B-Ⅲ: Ausdehnung bis zur Photonensphäre bei :
Standbild B-Ⅳ: Ausdehnung der Masse konvergiert auf den Ereignishorizont zu:
Standbild B-Ⅴ: Vakuumlösung (); die gesamte Masse befindet sich in der Singularität im Zentrum:
Diese Seite ist ein Unterkapitel von schwarzschild.yukterez.net; eine genauere Beschreibung und weitere Bilder folgen demnächst. Code (Mathematica Syntax):
Wie oben, nur mit der grr-Komponente der Kerr-Metrik in Boyer-Lindquist Koordinaten:
Kartesischer Radius auf der äquatorialen Ebene:
Einbettung in die Ř,w-Fläche:
Irreduzible Masse:
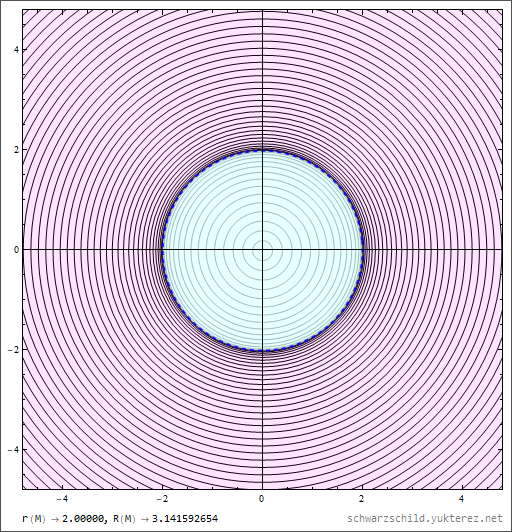
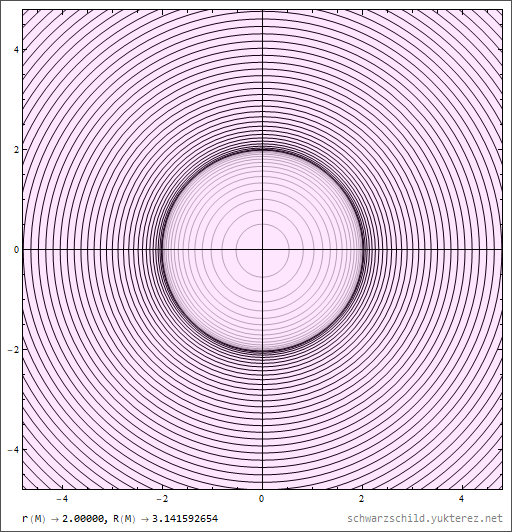
Die Spriralen symbolisieren die Pfade radial einfallender Photonen. Äquatorialer Querschnitt, kartesische Projektion; alle a/M von 0..0.99999, kombinierte und separate Ansicht:
Das transversale Grid zeigt Schalen die zueinander einen physikalischen Abstand von ΔR=Gℳ/c²/5 haben, wobei ℳ hier für die irreduzible Masse steht (der äquatoriale Ereignishorizont liegt in dieser Maßeinheit immer bei 2Gℳ/c²). Das radiale Grid kann anstatt durch einfallende Photonen auch durch Freifaller aus dem Unendlichen gezeichnet werden. Dafür wird v0 im folgenden ausklappbaren Code von 1 auf ж0 geändert (Vergleich siehe hier). Zoom auf das Thorn'sche Limit von a/M=0.998: klick, Code:
1D (r) auf 2D (r,w) Einbettung, Anzeige im Programmfenster:
Animation des 3D Paraboloids auf der äquatorialen θ=π/2 Ebene für alle Spinparameter; für eine alternative Darstellung ohne einlaufende Lichtstrahlen siehe Bardeen '72, Fig. 2. a/M läuft von 0 bis 1, Längeneinheiten wie oben in Gℳ/c² mit G=ℳ=c=1 wobei ℳ die irreduzible Masse ist. Die metrischen Abstände bleiben da ℳ im Gegensatz zu M von a unabhängig ist für alle a die gleichen, und der Horizont bleibt auf konstantem Ř: r=M+√(M²-a²)→Ř=√(r²+a²)=√(x²+y²+z²)→Ř=2ℳ:
Um die Animation auf ¼ des Tempos zu verlangsamen hier klicken. Bilder: Yukterez (Simon Tyran), CC BY-SA 4.0. Code:
2D (x,y) auf 3D (x,y,w) Einbettung, Export als Bildsequenz in den Dokumente-Ordner:



 ist der umfanggetreue Radius der Masse:
ist der umfanggetreue Radius der Masse:^2} \ , \ \ \frac{1}{1-\rm r_{s}/ \rm r }\right])
 Fläche als Kurvenlänge projizierte physikalische Radialdistanz
Fläche als Kurvenlänge projizierte physikalische Radialdistanz  :
:

 -Achse dargestellten Umfangradius
-Achse dargestellten Umfangradius  dar. Die
dar. Die  -Achse ist eine räumliche Hilfsdimension.
-Achse ist eine räumliche Hilfsdimension.  ) zeigt die Zeitdilation eines lokalen Schalenbeobachters; im inneren des schwarzen Lochs läuft die Eigenzeit eines stationären Schalenbeobachters relativ zur Koordinatenzeit des externen Koordinatenbuchalters wieder rückwärts - was ein mathematisches Artefakt ist, da es innerhalb des Horizonts keine stationären Beobachter mehr gibt, und es außerdem bereits eine unendliche Koordinatenzeit (wenn auch endliche Eigenzeit) dauert damit die Masse kleiner als ihr Ereignishorizont werden kann.
) zeigt die Zeitdilation eines lokalen Schalenbeobachters; im inneren des schwarzen Lochs läuft die Eigenzeit eines stationären Schalenbeobachters relativ zur Koordinatenzeit des externen Koordinatenbuchalters wieder rückwärts - was ein mathematisches Artefakt ist, da es innerhalb des Horizonts keine stationären Beobachter mehr gibt, und es außerdem bereits eine unendliche Koordinatenzeit (wenn auch endliche Eigenzeit) dauert damit die Masse kleiner als ihr Ereignishorizont werden kann.  :
: