


Kerr-Newman, second order differential equations of motion for a charged particle and photons. Animations by Simon Tyran, Vienna (Yukterez)
 This is the english version.
This is the english version.  Deutschsprachige Version auf kerr.newman.yukterez.net und Yukipedia.
Deutschsprachige Version auf kerr.newman.yukterez.net und Yukipedia. ←
←Accretion disk around a spinning and charged BH with a=0.95, ℧=0.3, ri=isco, ra=10, viewpoint=89°. Earth surface at r=1.01r+.

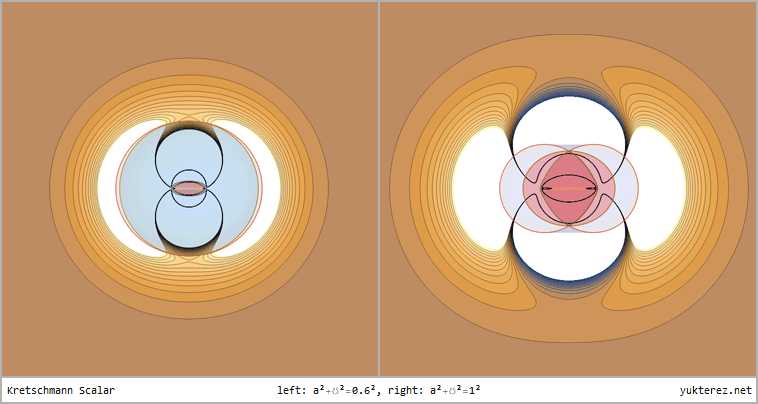 ←
←Kretschmann scalar, cartesian projektion. The areas around the poles are curved negatively, and those around the equator positively.
 ←
←Magnetic (left) and electric (right) field lines, cartesian projektion, view=90° (edge on), plot range=±5.
 ←
←Retrograde orbit of a charged particle (q=1) around a BH with spin & charge a=√¾ & ℧=⅓. v0 & i0: local initial velocity & inclination
 ←
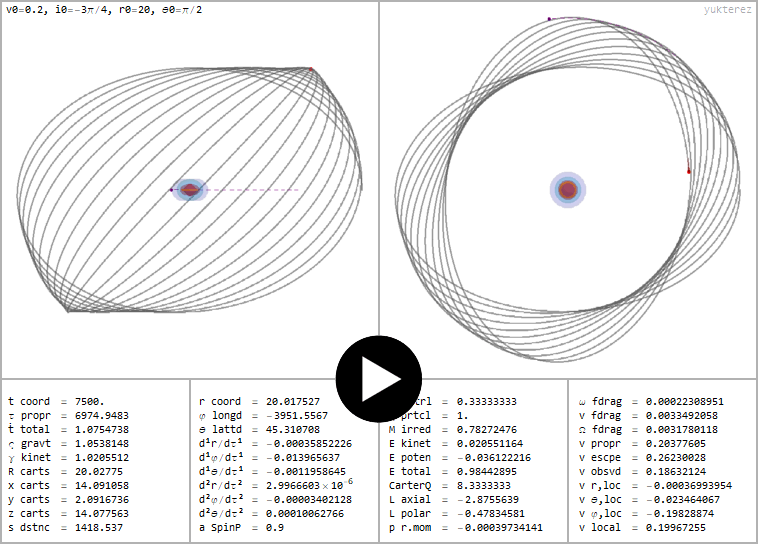
←Prograde orbit of a neutral testparticle around a spinning and electrically charged black hole with spin a=0.9 and charge ℧=0.4
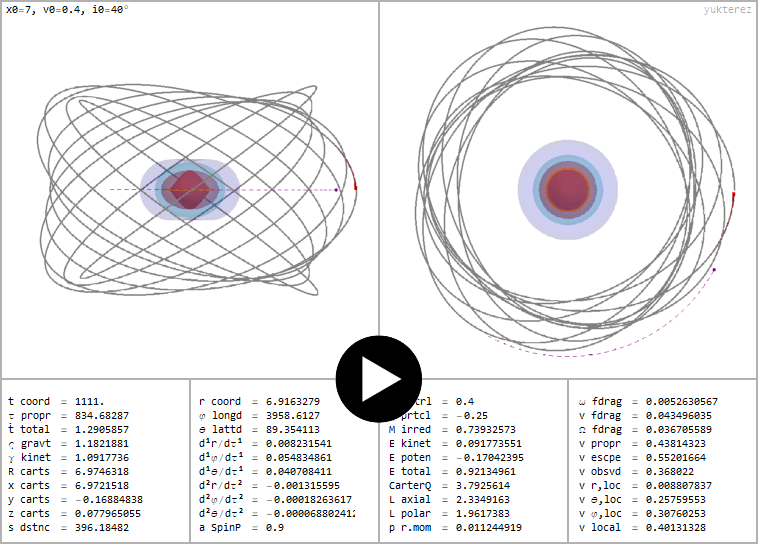 ←
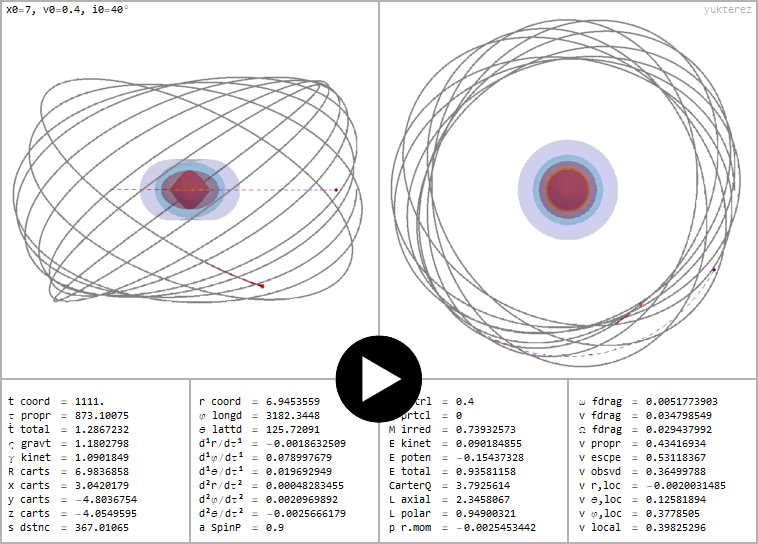
←Prograde orbit of a negatively charged testparticle around a spiining and positively charged black hole with the same parameters as above
 ←
←Nonequatorial and retrograde photon orbit around a spinning (a=½) and charged (℧=½) black hole, constant Boyer Lindquist radius
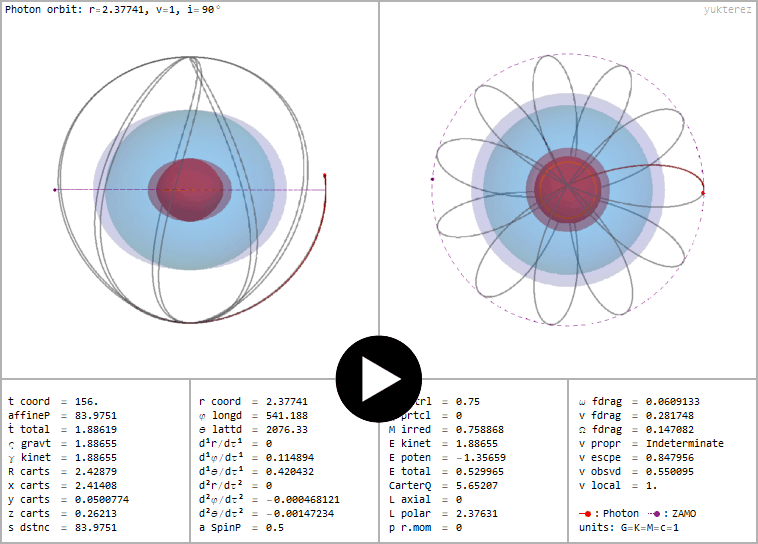 ←
←Polar photon orbit around a spinning (a=0.5) and charged (℧=0.75) black hole, constant Boyer Lindquist radius
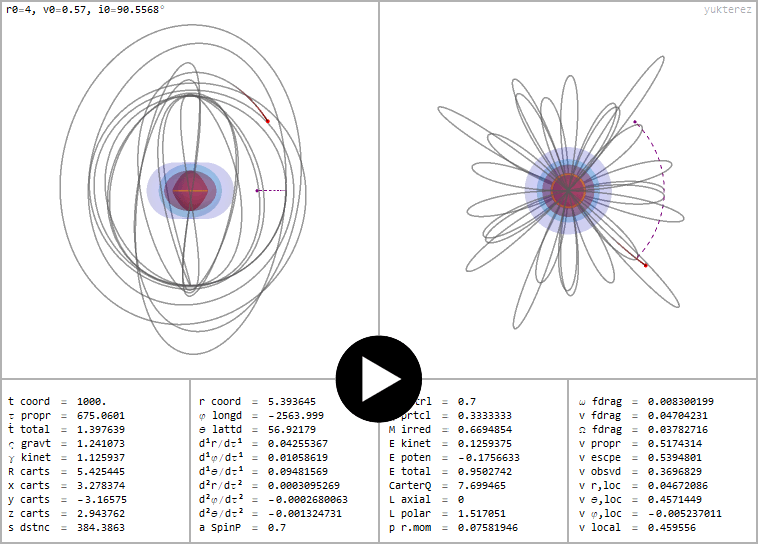 ←
←Polar orbit (Lz=0) of a positively charged testpaticle (q=⅓) around a positively charged and spinning black hole (℧=a=0.7)
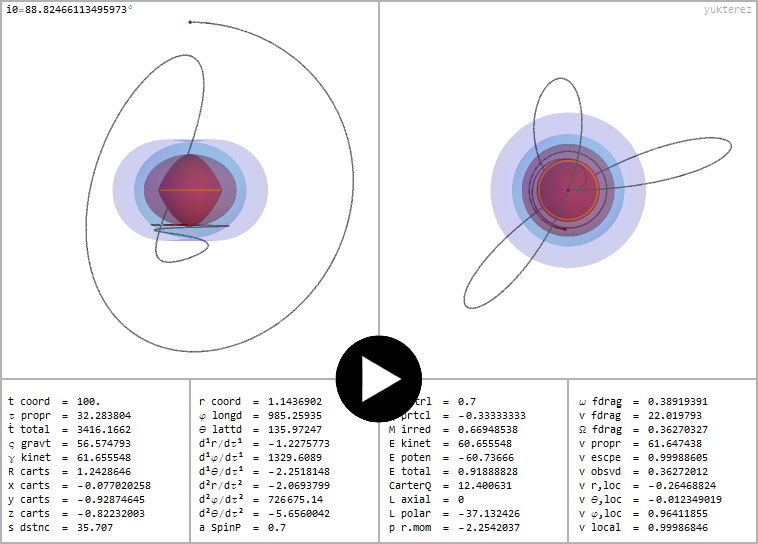 ←
←Plunge orbit of a negative particle (q=-⅓), BH like above. The nonpolar axial velocity for q<0 is positive for Lz=0 due to electric force.
 ←
←Free fall of a neutral testparticle around a rotating and charged naked singularity with spin a=1.5 and electric charge ℧=0.4
 ←
←Geodesic orbit around a naked Kerr Newman ringsingularity with the same spin and charge parameters as in the last example
 ←
←Nonequatorial and retrograde photon orbit around a naked singularity spinning with a=0.9 and charged with ℧=0.9
 ←
←Retrograde photon orbit around a naked singularity (a=0.99, ℧=0.99). Local equatorial inclination angle: -2.5rad=-143.23945°
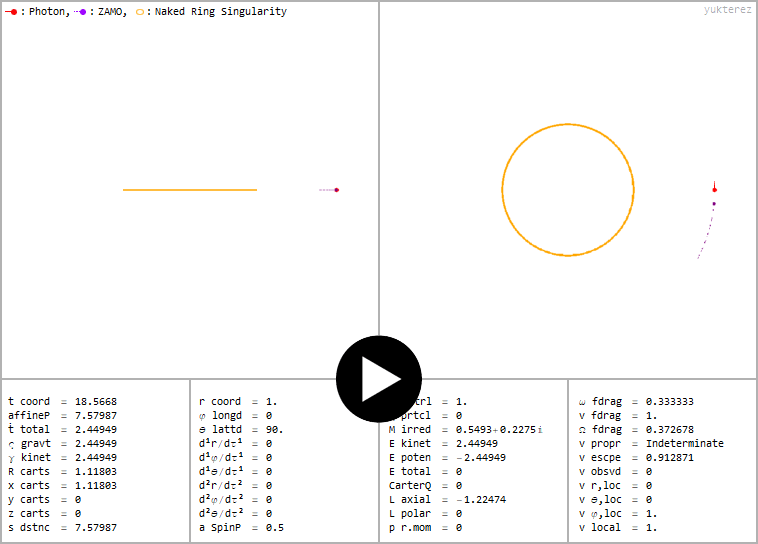 ←
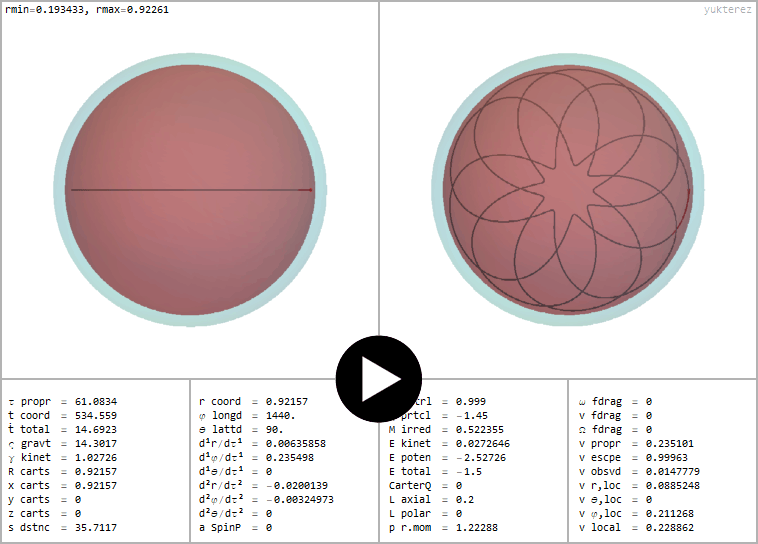
←Stationary photon orbit (E=0) around a ringsingularity (a=½, ℧=1). Except at r=1, θ=90° v framedrag is <c everywhere, therefore no ergospheres.
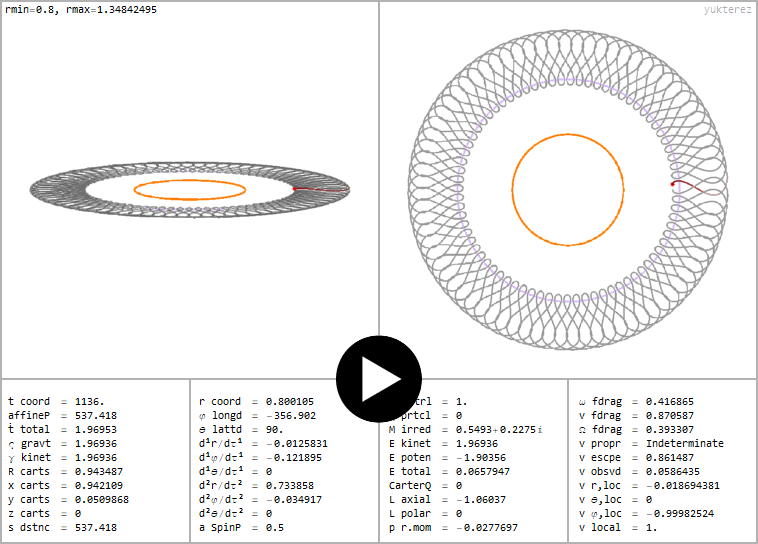 ←
←Equatorial retrograde photon orbit, singularity at r=0→R=√(r²+a²)=a=½. Ergoring (violet) at r=1, turning points at r=0.8 and r=1.3484
 ←
←Orbit of a negatively charged particle inside a positively charged Reissner Nordström black hole (also see Dokuchaev, Fig. 1)
Line element in Boyer Lindquist coordinates, metric signature (+,-,-,-):

Shorthand terms:

with the spin parameter â=Jc/G/M or in dimensionless units a=â/M, the specific electric charge Ω=⚼·√(K/G) and the dimensionless charge ℧=Ω/M. Here we use the units G=M=c=K=ℏ=1 with lengths in GM/c² and times in GM/c³. The relation between the mass-equivalent of the total energy and the irreducible mass Mirr is

Effective mass:

For testparticles with mass μ=-1, for photons μ=0. The specific charge of the test particle is q. Transformation rule for co- and contravariant indices (superscripted letters are not powers but indices):

Co- and contravariant metric:

Electromagnetic potential:

Covariant electromagnetic tensor:

Contravariant Maxwell-tensor:

Magnetic field lines:

Electric field lines:

with the term

With the Christoffel symbols:

the second proper time derivatives of the coordinates are:

Equations of motion:




Canonical 4-momentum, local 3-velocity and 1st proper time derivatives:

From the line element:
we get the total time dilation of a neutral particle:

Total time dilation of a charged particle:

Relation between the first time derivatives and the covariant momentum components:


Relation between the first time derivatives and the local three-velocity components:



with the contracted electromagnetic potential

The radial effective potential which defines the turning points at its zero roots is

and the latitudinal potential

with the parameter

For the 3-velocity relative to a local ZAMO we take E and solve for v:

or divide the gravitational time dilation by the total time dilation to get the inverse of the Gamma factor:

Radial escape velocity for a neutral particle:

For the escape velocity of a charged particle with zero orbital angular momentum we set E=1 and solve for v:

1. Constant of motion: Total energy E=-pt

2. Constant of motion: axial angular momentum Lz=+pφ

3. Constant of motion: Carter's constant

with the coaxial component of the angular momentum, which itself is not a constant:

Radial momentum component:

The azimuthal and latitudinal impact parameters are

Gravitative time dilatation of a corotating neutral ZAMO, infinite at the horizon:

Time dilation of a stationary particle, infinite at the ergosphere:

Frame-dragging angular velocity observed at infinity:

Local frame-dragging velocity relative to the fixed stars (c at the ergosphere):

Axial and coaxial radius of gyration:

Axial and coaxial circumference:

The radii of the equatorial photon orbits are given implicitly by:

The innermost stable orbit (ISCO) of a neutral particle is given by:

Radial coordinates of the horizons and ergospheres:

Cartesian projection:

r in relation to x,y,z:

Cartesian radius:

Cartesian latitude:

Hawking temperature (with surface gravity κ⁺):

Transformation rule from Boyer Lindquist to Doran Raindrop:

Relative to a local ZAMO the river of space has the negative radial escape velocity:

Metric tensor in Doran Raindrop coordinates, covariant:

Contravariant metric tensor:

Electromagnetic vector potential:

Covariant Maxwell-tensor:

Contravariant electromagnetic tensor:

Coordinate time differential:



More details: this way, comparison Boyer Lindquist with Raindrop Doran (animation and plots): click, other coordinates: geodesics.yukterez.net, view from the inside of a black hole: click
Horizons and ergospheres in pseudospherical (r,θ,φ) and cartesian (x,y,z) coordinates:

Simulator code: click here, other coordinates: click here
images and animations by Simon Tyran, Vienna (Yukterez) - reuse permitted under the Creative Commons License CC BY-SA 4.0
